

info@gerb.com
Estudo de Caso sobre as Tecnologias de Amortecimento para Edifícios Altos: Conforto e Segurança
Council on Tall Buildings and Urban Habitat (CTBUH) Damping System Guidelines
Thyssen Krupp Test Tower, Rottweil/Alemanha
Dados do Projeto
- Ano de Conclusão:
2016 (colocação da última viga) - Construtor/Empreiteiro/Proprietário:
Krupp Hoesch Stahl GmbH/Thyssen Krupp Elevators - Engenheiro Projetista:
Werner Sobek com JAHN Architects Stuttgart and Chicago - Projetista de Estruturas:
Werner Sobek Stuttgart - Fornecedor do Sistema de Amortecimento:
GERB Vibration Control Systems - Laboratório de Testes:
Wacker Ingenieure (Wind Engineering / Wind Tunnel Tests) - Altura/Altura entre Andares:
246 m/3,3 m (pé-direito do escritório) - Relação de Nível de Espessura:
1/11,8 - Andares:
27 Níveis / 8 Andares para Escritórios - Área Bruta da Torre:
340 metros quadrados - Função de Construção:
Torre de Testes de Elevadores/Escritórios/Plataforma de Observação (232 m) - Material Estrutural:
Concreto Armado (C50/60) / Fachada de Membrana de PTFE sobre uma estrutura de aço - Sistema Estrutural:
Núcleo de Concreto Armado em Cantiléver sobre um Ensoleiramento Geral
(- 32 m) - Estratégia de Amortecimento Utilizada:
Sistema de Amortecedor de Massa Híbrido (240 t)

1.0 Introdução/Histórico
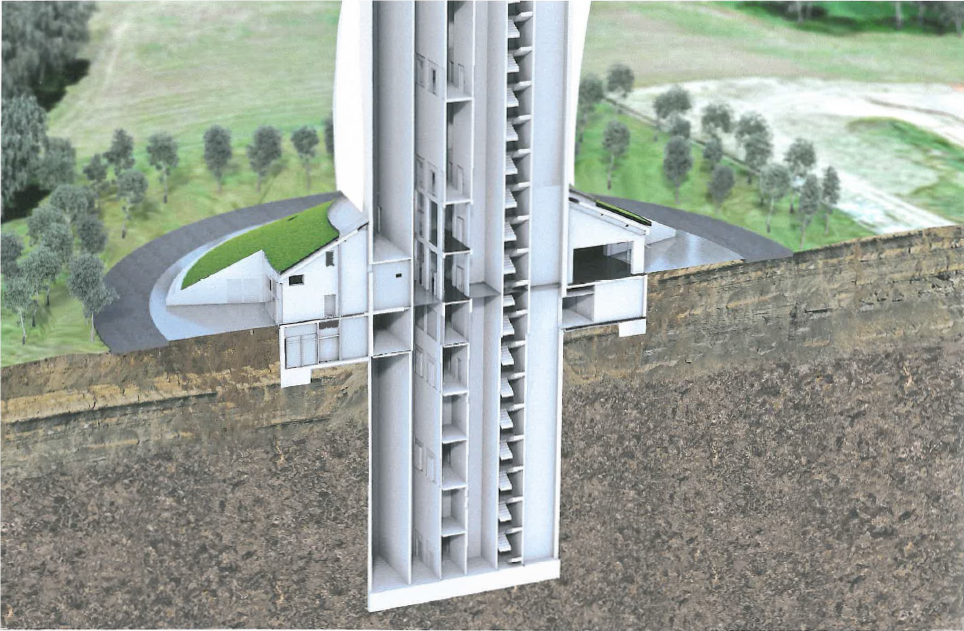
Ergueu-se uma torre de 246 m de altura no Sudoeste da Alemanha com o objetivo de acomodar uma instalação de testes para inovações em elevadores. A torre tem uma área útil circular com um diâmetro de 20 m e espaço para 9 poços de elevador de teste, um elevador de emergência em caso de incêndio e um elevador com vista panorâmica de vidro. Além disso, é projetado um poço de 220 m para ser utilizado como poço de elevação mecânica para assegurar os programas de teste.
A base da torre tem um diâmetro de 40 m, o que proporciona espaço adicional para instalações de serviço, um átrio e um centro educativo. A uma altura de 232 m, uma plataforma de observação, a mais alta da Alemanha, possibilita uma vista espetacular para a Floresta Negra e mesmo para os Alpes, em dias claros.

2.0 Sistema Estrutural
O sistema estrutural da Torre de Testes consiste basicamente num tubo de concreto armado com um diâmetro de 20,8 m, que é fixado a 30 metros de profundidade no solo circundante (ver Figura 2). Até aos 110 m de altura, o tubo tem uma espessura de 40 cm e, daí para cima, de 25 cm. O solo, constituído por uma camada de Keuper e calcário conquífero subjacente, proporciona uma elevada capacidade de suporte, pelo que não foi necessária uma fundação com estacas. Para além da fixação no solo circundante, a estrutura mais larga da base da torre proporciona uma rigidez lateral adicional.
O endurecimento interno do tubo de concreto resulta principalmente das paredes internas dos poços dos elevadores. Apenas a determinados níveis de altura foram instaladas placas pré-fabricadas no teto, de forma a permitir o acesso aos poços dos elevadores. Alguns dos poços dos elevadores terminam a uma altura de 115 m e são cobertos por pavimentos de 40 cm de espessura de vão longo que foram moldados no local. Estes pavimentos são utilizados para espaços de escritório. Acima, um espaço vazio que se estende até aos 197 m é utilizado como um reservatório de calor e para o sistema TMD. A parte superior da torre é utilizada para os espaços de escritório e para os restantes poços de elevador.
Uma caraterística distintiva da Torre de Testes é a fachada têxtil que consiste numa malha de fibra de vidro revestida com PTFE. A largura da abertura da malha aumenta com a altura do edifício para aumentar a translucidez da fachada, diminuir a densidade e o peso do material e também para efeitos aerodinâmicos.
A forma em espiral da fachada destina-se a funcionar como uma espiral de Scruton e o próprio tecido ajuda a proteger a estrutura de concreto para evitar tensões térmicas provocadas pela radiação solar. Para o design da fachada e a escolha dos aspetos materiais da instalação, a manutenção e a durabilidade, bem como a carga de vento, tiveram de ser considerados.
3.0 Método de Construção

A construção da Torre de Testes foi feita de acordo com os seguintes passos:
- Escavação de um fosso de construção circular de 30 m para a base da torre. A escavação e a forma foram obtidas através de uma detonação inicial. Após a escavação, o fosso foi fixado com ferros no solo e revestimento de concreto projetado.
- Colocação do ensoleiramento geral
- Construção da estrutura vertical de concreto utilizando a cofragem deslizante. Todas as paredes foram construídas continuamente durante um período de 4 meses
- Construção das placas para o pavimento
- Construção da zona de entrada.
4.0 Resposta Dinâmica Prevista à carga de vento
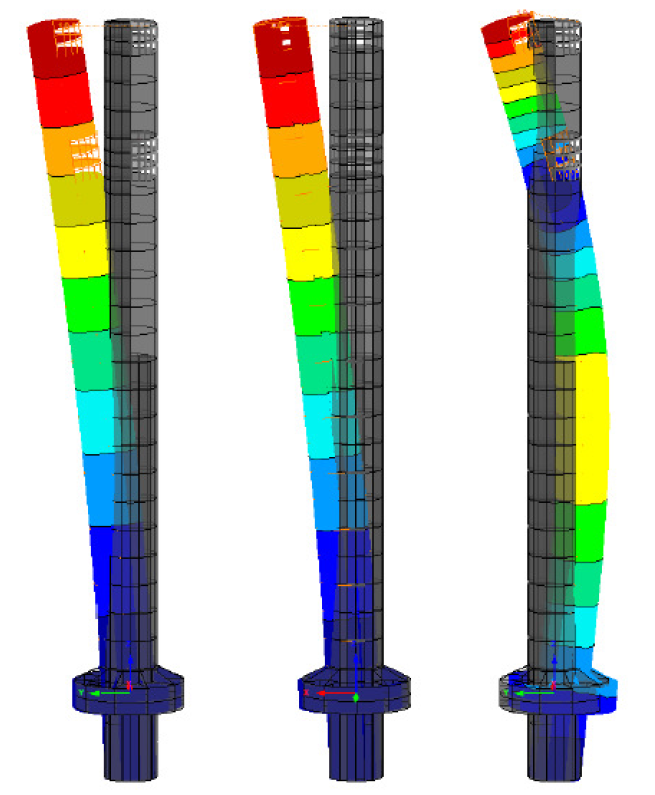
Previa-se que as frequências fundamentais para a Torre de Testes estivessem no intervalo de 0,17 Hz – 0,20 Hz segundos, dependendo da fase de construção e do estado do concreto (com/sem fissuras) – ver Figura 4.
A análise do vento revelou que a excitação ressonante da estrutura pode ocorrer a velocidades do vento que correspondem aos valores do solo (a uma altura de 10 m) no intervalo de 55 – 60 km/h. Previa-se que, sem amortecimento adicional, esta excitação ressonante causasse deflexões do topo da estrutura de cerca de +/- 750 mm, que não só causariam desconforto aos ocupantes como também teriam implicações de fadiga significativas na vida útil da estrutura de concreto da torre (ver Figura 5). Para reduzir a resposta dinâmica à excitação provocada por ventos cruzados, foi implementado um Sistema de Amortecimento Passivo de Massa Sintonizada. Uma vez que a torre se destina a ser utilizada como Torre de Testes para a construção de equipamentos de elevadores sensíveis à oscilação, o proprietário andava à procura de uma possibilidade de
excitar artificialmente a torre em dias calmos, embora com deslocamentos que não causassem quaisquer problemas de fadiga. A altura solicitada para o movimento de oscilação artificial estava situada no intervalo de aproximadamente +/- 200 mm, o qual foi considerado seguro. Este pedido proporcionou a rara oportunidade de implementar um Amortecedor de Massa Híbrido (HMD) ou, uma vez que o sistema de design diverge de outros sistemas de HMD que foram produzidos anteriormente, um chamado TMD de Dupla Utilização. O sistema deve ser apresentado nos capítulos seguintes, incluindo a otimização do sistema passivo, o design do mecanismo dos atuadores, os algoritmos de controle e o conceito de segurança.

5.0 Otimização do Sistema Passivo de Amortecedor de Massa Sintonizada
Os parâmetros do sistema TMD passivo tiveram de ser determinados considerando três aspetos diferentes a) proporcionar um amortecimento estrutural adicional suficiente para reduzir a resposta dinâmica devido à excitação por desprendimento de vórtices, b) limitar o curso da massa principal do TMD resultante no modo passivo a um valor tangível/viável, para situações de rajadas de vento cruzado e c) escolher a massa do TMD de acordo com a introdução de energia necessária para a deflexão máxima desejada da torre no modo de excitação, considerando a envolvente de desempenho ativada pelos atuadores fornecidos
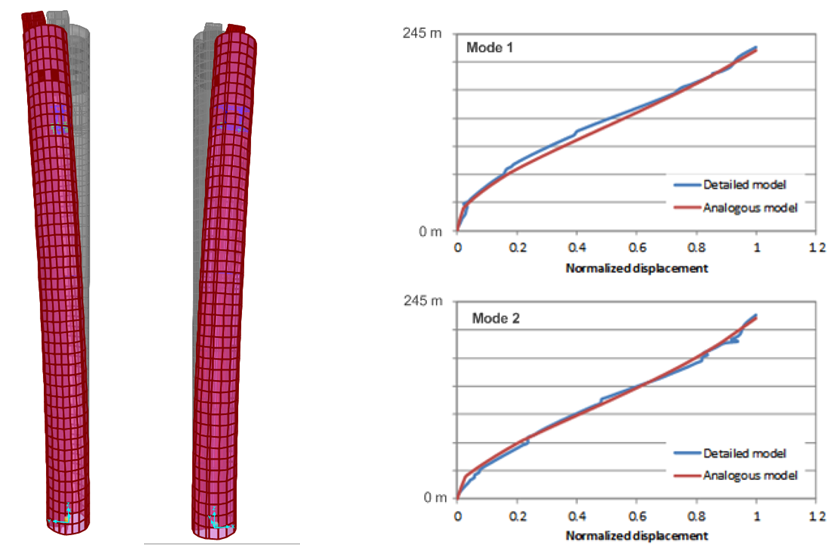
(isto é, força máxima gerada e curso máximo durante a operação). Para otimizar o sistema do TMD, foi utilizado um modelo numérico que representava a distribuição da massa da torre, e os momentos de inércia da massa, conforme relatado nas propriedades estruturais identificadas. Os elementos de rigidez entre os pisos foram também adaptados para corresponderem às formas e frequências naturais das observações em escala real. A figura 6 (à esquerda) mostra as formas de modo e as frequências naturais deste modelo análogo utilizado. A figura 6 (à esquerda) também compara as formas de modo do modelo análogo com as formas do modelo detalhado que foi preparado pelo consultor estrutural.
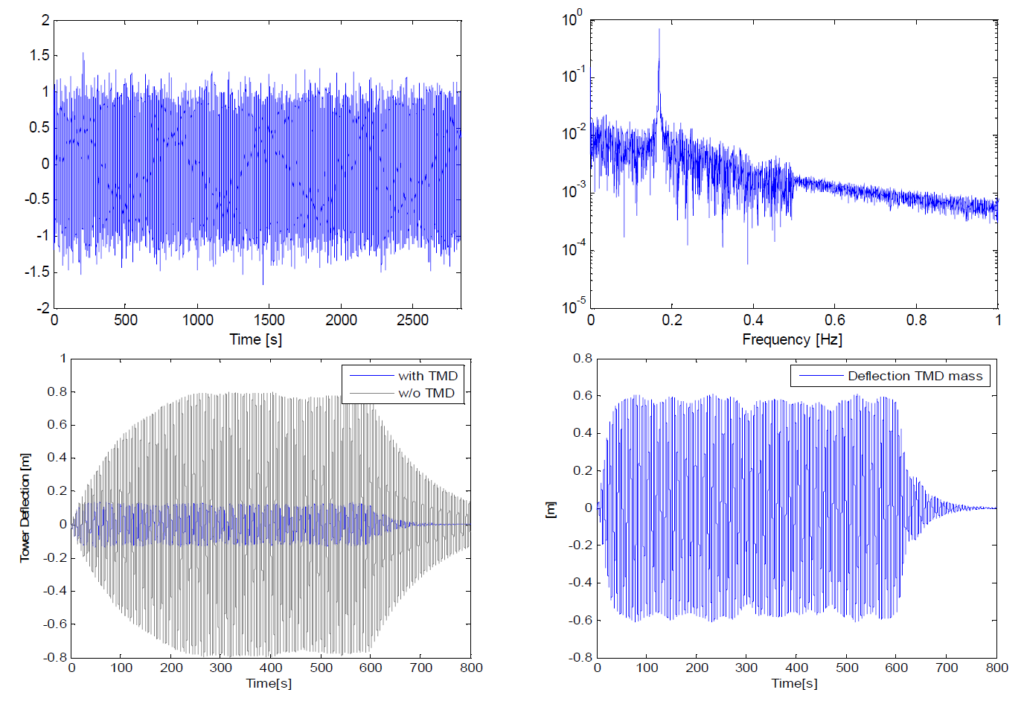
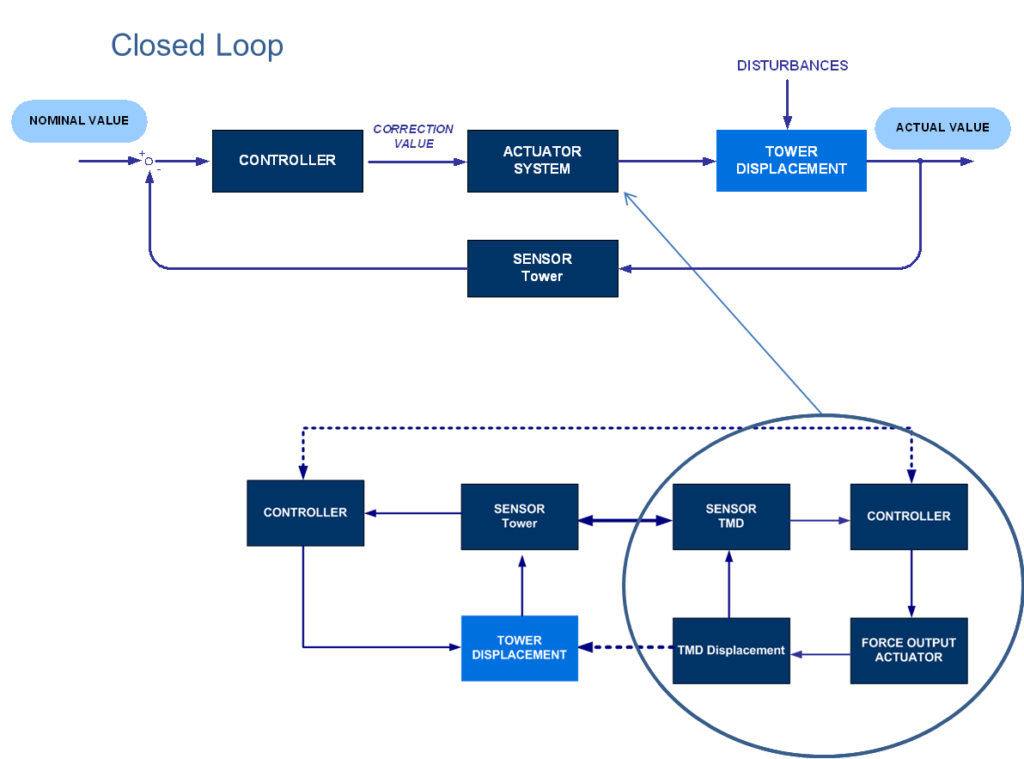
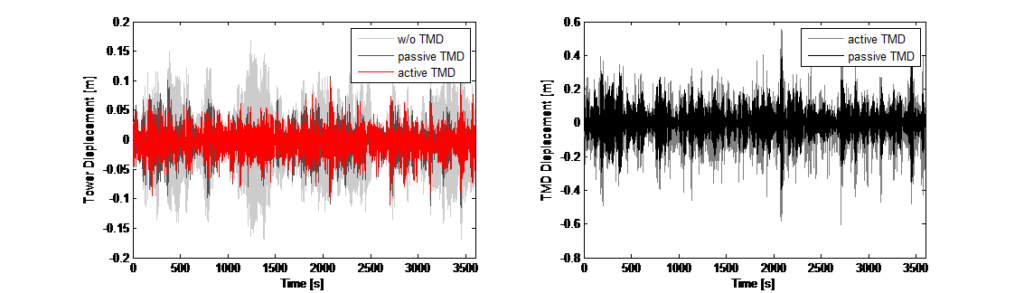
Além disso, o TMD foi discretamente modelado como um sistema de pêndulo ao capturar também a sua posição excêntrica na torre. As características de carga para o caso introduzido aplicável, ou seja, a excitação ressonante devido ao desprendimento de vórtices, são muito semelhantes às de uma única excitação harmônica. No entanto, a carga de rajadas coexistentes é inerentemente de natureza estocástica e, para tal, aplicam-se outros critérios de otimização diferentes do reconhecido critério de Den Hartog. Além disso, os deslocamentos relativos da massa do TMD são maiores para uma carga do tipo estocástico do que para uma carga de tipo harmônico. Uma vez que para a determinação numérica dos parâmetros ideais do TMD deve ser considerada uma carga próxima da realidade, foi gerado um historial temporal que incluiu tanto a carga de rajada estocástica (baseada no espetro de Davenport) como um componente ressonante sobreposto, semelhante a um desprendimento de vórtice, para representar a excitação geral do vento cruzado (ver Fig. 3 – à direita). A redução da deflexão da torre que pode ser alcançada com o sistema TMD passivo otimizado, bem como os deslocamentos resultantes do TMD, são mostrados na Fig. 3 – à direita.
Com base nestes resultados para um amortecimento estrutural inerente estimado em ξ=0,8 %, determinou-se que era necessária uma massa de TMD de 240 t para manter os deslocamentos dentro de +/- 650 mm, mantendo simultaneamente uma taxa ótima de amortecimento do TMD para o desempenho ideal do TMD. Um aumento do amortecimento do TMD poderia ter reduzido o curso, embora a eficácia ainda teria sido suficiente, mas isso teria afetado negativamente os requisitos de força do atuador. Para determinar as forças necessárias para a configuração ótima de 240 t do TMD, o modelo análogo foi também utilizado para verificar que, com uma força máxima de 40 kN a partir dos atuadores, as deflexões da torre podem ser alcançadas no intervalo de +/- 200 mm. A figura 4 mostra os resultados de uma simulação numérica de domínio temporal no modelo numérico análogo; para isso, são mostrados as deflexões resultantes do topo da torre, as deflexões de massa do TMD e as forças ativas de introdução que as provocam.


6.0 Descrição do sistema de controle
A dualidade do sistema de controle serve a) o propósito de um consumo reduzido de energia, enquanto estiver em funcionamento passivo normal, para reduzir as vibrações ocorridas b) o propósito de requisitos reduzidos de força para os atuadores, utilizando efeitos de ressonância de modo a excitar a massa principal do TMD para, por fim, atingir o requisito de força real. Assim, em comparação com outros sistemas de controle (ver Figura 1), os atuadores ligam a estrutura principal e a massa do TMD mas não são utilizados para controlar diretamente a massa do TMD, como seria o caso de um típico Sistema Ativo de Acionador/Amortecedor de Massa.
Para o TMD de Dupla Utilização implementado, foi escolhida uma massa de reação para a operação passiva de 240 toneladas. Para o modo de operação de excitação, dois acionamentos lineares – um em cada direção principal – estão ligados à massa do TMD com pivôs próximos do centro de gravidade da massa para evitar qualquer artefacto de torção. Cada acionador linear pode fornecer forças até 40 kN dentro de um curso máximo. +/- 600 mm (ver detalhe na Fig. 2). Os acionamentos lineares podem ser desencaixados para que todo o modo passivo não seja influenciado pelos rolamentos dos atuadores para o caso improvável de uma falha dos rolamentos.
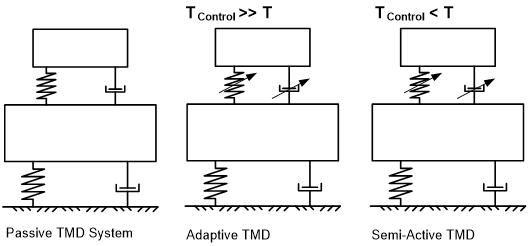
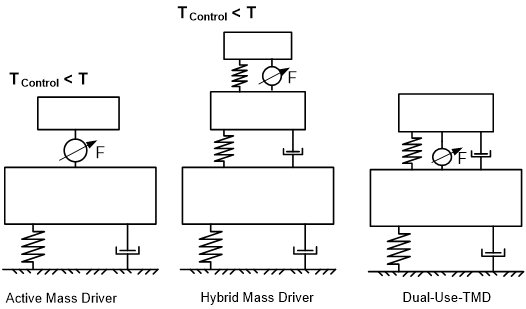
Figura 10 – Tipos de Sistemas de Controle – TMD de Dupla Utilização em comparação com sistemas passivos, semi-ativos, ativos e híbridos
O sistema é instrumentado com quatro acelerômetros uniaxiais (K-Beam/MEMS sísmicos; um em cada direção) para determinar o nível superior da torre e as acelerações de massa do TMD. Os sinais de aceleração estão a ser filtrados num filtro passa-banda dentro do intervalo de frequências das frequências naturais fundamentais da torre (0,1 – 0,3 Hz) e integrados para obter as velocidades e deflexões da torre.
Além disso, os valores de deslocamento integrado podem ser comparados com os de um Sistema Global de Navegação por Satélite de cortesia instalado também no topo da estrutura para comparação de desvios de sinal. Foi efetuado um teste inicial de correlação em conformidade. Além do mais, os deslocamentos do TMD são monitorizados diretamente com potenciómetros de cabo e um sistema de medição indutivo de comprimento integrado nos motores lineares.
7.0 Algoritmo de controle
O circuito de controle geral da torre é apresentado na Fig. 5, que ilustra a sequência de controlo em circuito fechado. Um design detalhado do algoritmo de controle exigiria modelos analíticos da interação entre os atuadores e a massa do TMD para determinar a ligação entre a introdução do atuador e a força de ação aplicada. Estes devem combinar-se com o modelo analítico da estrutura principal que descreve o comportamento dinâmico global do edifício. Além disso, em comparação com os algoritmos de controle padrão que foram aplicados a outras aplicações do HMD, como em [2],[3] ou teoricamente investigados, como [1] no algoritmo de controle para esta aplicação de torre, teve de ser considerada a excitação controlada sincronizada numa direção principal e a redução da vibração na direção perpendicular. Uma vez que a resposta dinâmica é majoritariamente esperada nos modos fundamentais, o controle do feedback linear com todos os seus benefícios para evitar instabilidades poderia ser aplicado para ambas as tarefas. Para a simples realização de controle praticada, o controle de feedback linear, que atenua a resposta dinâmica perpendicular à excitação da torre, aciona o atuador correspondente através de uma soma linear ponderada especificada de sete medições dinâmicas estruturais. Estas medições são: Das acelerações do TMD e do topo da torre, das velocidades do TMD e do topo da torre, dos deslocamentos do TMD e do topo da torre, e do deslocamento relativo do TMD e do topo da torre.
É importante realçar que os fatores de ponderação pré-selecionados são ganhos em escala simples, positivos ou negativos. A parametrização dos fatores de ponderação baseia-se nos testes dinâmicos da torre, não estando a utilizar qualquer modificação dependente da frequência. O feedback do atuador ativo é calculado instantaneamente (a 50 Hz), e é novamente uma combinação linear das medições dinâmicas anteriores. Não há qualquer utilização de manipulação não linear. O design do controle também foi implementado numa simulação numérica no domínio do tempo (ou seja, integração direta) para evidenciar o desempenho da atenuação de vibração do controlo do acionador. Para o modo de excitação, foi utilizada a mesma abordagem de controle em combinação com um desvio de deslocamento que representa a excitação da torre para o valor de deslocamento pretendido. O desvio é uma função sinusoidal baseada na frequência fundamental detetada de cada direção. A saída de controle para contrariar a variação do deslocamento do topo devido a outras perturbações é depois modulada na função de desvio sinusoidal e o valor de controle é adaptado em conformidade.
O controle de feedback linear de redução da resposta dinâmica da torre perpendicular à excitação permite que o comando de força para o atuador seja uma soma linear ponderada especificada das sete medições dinâmicas do programa. As sete medições são: Da aceleração do TMD e da torre, da velocidade do TMD e da torre, do deslocamento do TMD e da torre, e do deslocamento relativo do TMD e da torre. É importante realçar que os fatores de ponderação são valores em escala simples, positivos ou negativos. A parametrização do fator de ponderação baseia-se em testes experimentais dinâmicos da torre. O feedback do atuador que está ativo é calculado instantaneamente (50 Hz)
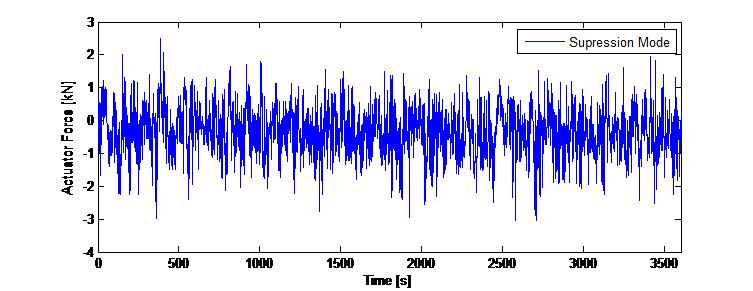
e os fatores de ponderação são em escala, sendo que não utilizam qualquer forma de função de transferência dependente da frequência. Além disso, o feedback é uma combinação linear da propriedade dinâmica. Não há qualquer utilização de manipulação ou lógica não linear. O design de controle foi implementado para uma simulação numérica no domínio temporal (integração direta) de modo a que, para cada passo temporal, a introdução de força para a massa do TMD como controlo do atuador possa ser adaptada. A figura 12 mostra os resultados da simulação para a supressão de vibrações – os deslocamentos da torre e o curso resultante da massa do TMD.
Para o modo de excitação, foi utilizada a mesma abordagem de controlo em combinação com um desvio que representa a excitação da torre para um valor de deslocamento pretendido. O desvio é uma função sinusoidal baseada na frequência fundamental detetada de cada direção. A saída de controlo para contrariar a variação do deslocamento do topo devido à perturbação é depois modulada na função de desvio
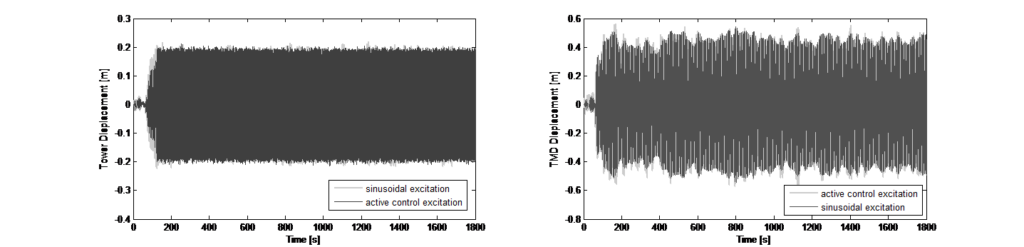
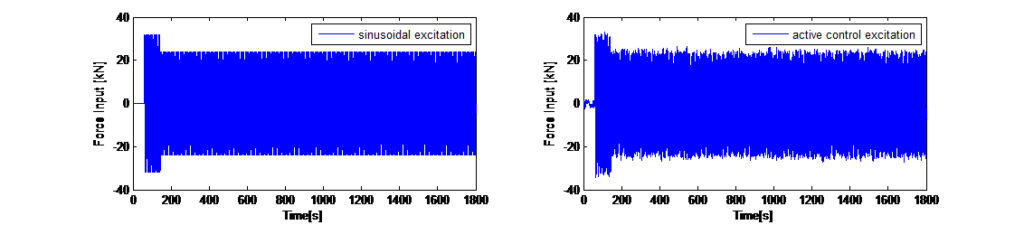
Sinusoidal e o valor de controlo tem de ser adaptado em conformidade. Para este desvio, foi determinado experimentalmente um fator de ponderação. A figura 13 mostra os resultados numéricos com perturbação da carga de rajada de vento para o modo de excitação com uma simples excitação sinusoidal e com um algoritmo de controlo aplicado.
8.0 Conceito de segurança
Tendo em consideração a força de +/- 40 kN que pode ser fornecida pelos acionamentos lineares que são utilizados como atuadores, é indispensável um conceito de segurança para assegurar que os deslocamentos da torre não excedam as disposições de fadiga. Isto aplica-se mesmo que a saída de força não seja suficiente para causar deflexões do topo superiores aos +/-200 mm pré-determinados. Uma abordagem para aumentar a segurança do sistema foi aumentar a redundância dos sensores de monitorização que estão a registar a deflexão do topo da torre. Isto pode ser alcançado da melhor forma através da implementação de um sistema de monitorização independente adicional que, idealmente, utiliza um princípio de medição diferente do hardware de controlo existente. Para o projeto aqui apresentado, o hardware de controle utilizou, conforme referido, acelerómetros e um limiar de aceleração definido para a filtragem de sinais com filtro passa-banda dentro do intervalo de frequências naturais relevantes da estrutura. O principal sistema de monitorização superordenada é um Sistema Global de Navegação por Satélite (GNSS) com uma precisão de +/- 10 mm.
O sistema GNNS requer uma estação básica de referência que esteja a processar os dados de coordenadas para os valores existentes de resposta ao deslocamento. Se o deslocamento do topo da torre exceder um limiar pré-determinado durante o modo de excitação artificial, que pode dever-se a um acréscimo de vento ou a outra excitação, um relé irá comutar o sinal de presença para 0 V. Isto provocará a interrupção do modo de excitação. Adicionalmente, ambos os sistemas de monitorização estão constantemente a verificar os dados adquiridos para detectar sinais de sensores defeituosos, o que também resultará na interrupção do modo de excitação ativo. Os sinais defeituosos de aceleração/potenciómetro de cabo serão detetados por um critério de seleção de pico espetral – apenas se for possível a seleção de picos num intervalo relevante, pode assumir-se que os sensores fornecem sinais legítimos. Enquanto o sistema GNNS analisa a alteração dos dados das coordenadas, se os dados amostrados não se alterarem a tempo, assume-se automaticamente que existe um sinal defeituoso.
9.0 Testes de Vibração
Os testes iniciais de vibração da torre foram executado na fase atual, na qual a torre ainda não está concluída, pelo que as frequências fundamentais da torre nesta fase estão acima do intervalo de sintonização especificada do sistema passivo do TMD. O TMD é ajustado para a maior frequência de sintonização possível. O objetivo dos testes de vibração foi a determinação das frequências fundamentais da torre com o sistema TMD bloqueado, bem como o amortecimento estrutural inerente. Além disso, o comportamento dinâmico com o sistema passivo do TMD acionado deve ser determinado, bem como o aumento do amortecimento estrutural devido ao sistema passivo do TMD. Para identificar as frequências naturais fundamentais da torre, o Método da Densidade Espetral de Potência Normalizada Média (ANPSD) [1] pode ser utilizado. Para isso, os históricos temporais registados têm de ser separados em segmentos. Estes segmentos têm de ser transformados no domínio da frequência. Os espectros resultantes têm de ser normalizados, calculados como média e multiplicados com os espetros conjugados complexos.
Ao fazê-lo, todas as vibrações aleatórias serão eliminadas e apenas as vibrações livres recorrentes da estrutura serão exibidas no espectro médio, que agora representa as frequências naturais predominantemente excitadas da torre. A figura 14, à esquerda, mostra os históricos temporais registados das vibrações ambientais horizontais nas direções x e y com o TMD bloqueado. A figura 14, à direita, mostra a média dos Espectros de Potência Automática resultantes para um comprimento de segmento de 120 segundos. Os espectros mostram que a torre apresenta uma resposta dinâmica a duas frequências dominantes (0,225 Hz na direção x e 0,245 Hz na direção y).
Para além do Método do Espectro de Potência Média acima descrito, que assume que a excitação ambiente provoca uma resposta dinâmica suficiente nos modos de vibração de interesse para obter segurança estocástica, as frequências naturais foram determinadas utilizando o software de processamento de sinais comerciais ARTEMIS, [1] que incorpora os Métodos de Identificação do Subespaço Estocástico e de Decomposição Melhorada do Domínio da Frequência.
A Decomposição Melhorada do Domínio da Frequência (EFDD) e a Identificação do Subespaço Estocástico são técnicas vastamente utilizadas para a identificação de parâmetros modais apenas de saída.
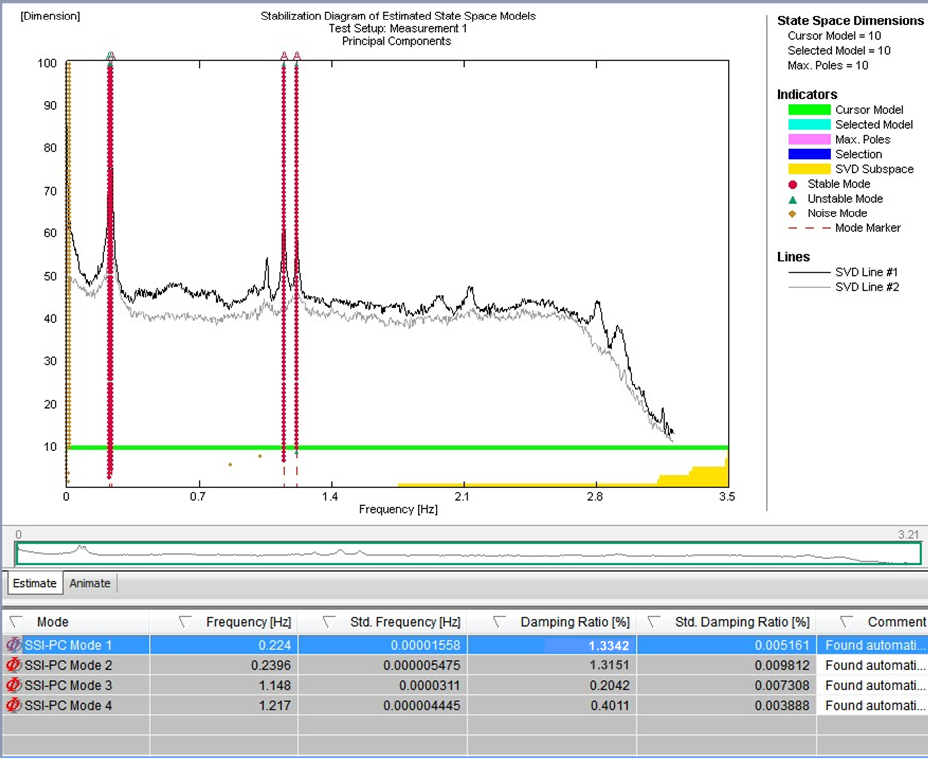
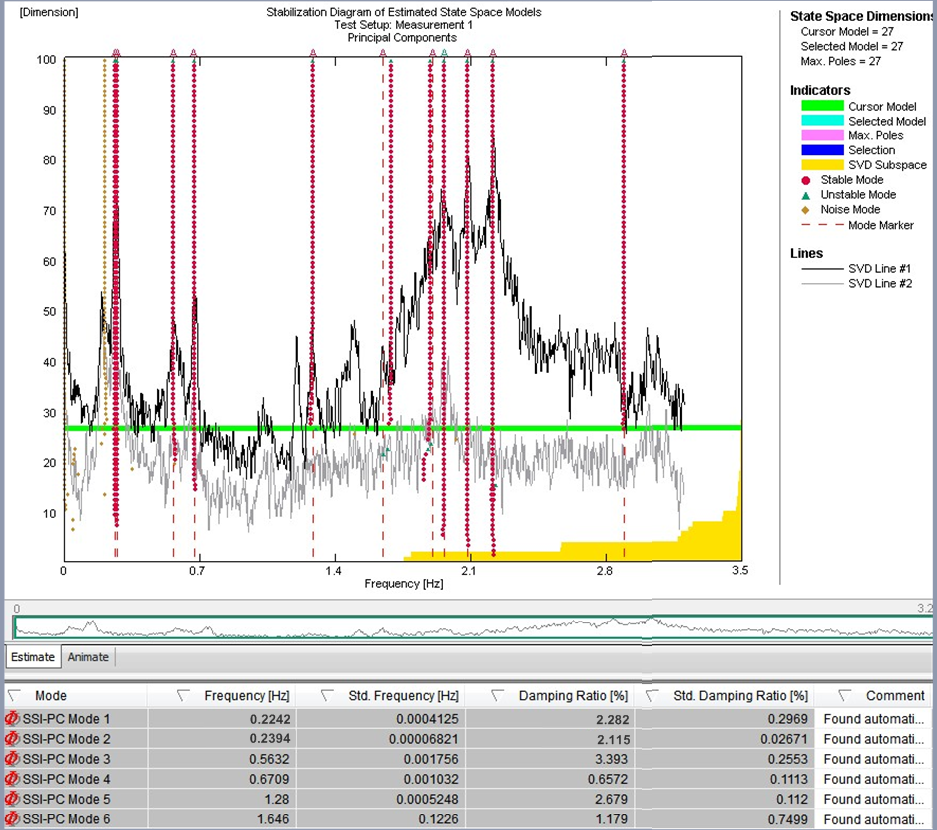
Figura 15 – Cartões de Estabilidade para o registo de vibrações ambiente com TMD bloqueado (à esquerda) e TMD ativado (à direita)
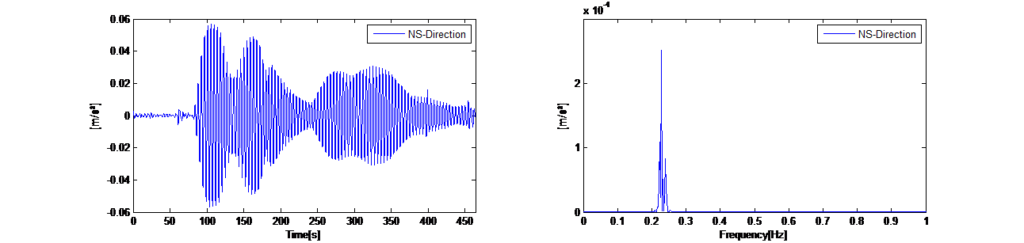
O método EFDD baseia-se no cálculo dos espectros de resposta. São, portanto, necessários registos extensos para manter um nível reduzido de erros na estimativa do espectro e para extrair parâmetros modais de uma forma fiável. O algoritmo de identificação do subespaço estocástico foi aplicado para identificar pontes através da utilização de um modelo apenas de saída. Os métodos de identificação do subespaço estocástico funcionam no domínio temporal e baseiam-se numa descrição do espaço para o estado do problema dinâmico. Os resultados da identificação do sistema em diferentes ordens de modelos são comparados para distinguir os verdadeiros modos estruturais dos modos espúrios nos chamados diagramas de estabilização. Estes diagramas são uma forma popular de selecionar o modelo do sistema identificado, uma vez que os verdadeiros modos estruturais tendem a ser estáveis para ordens de modelos sucessivos, cumprindo certos critérios de estabilização que são avaliados num procedimento automático. A figura 15 mostra um cartão de estabilidade resultante para os dados ambientais registados, a partir do qual os modos relevantes podem ser determinados. Os modos identificados e as taxas de amortecimento determinadas para cada modo no estado com TMD bloqueado (à esquerda) e com o TMD ativado (à direita) também são mostrados na Figura 14. Pode ser observado um aumento do amortecimento estrutural. O amortecimento estrutural adicional encontra-se no intervalo de um valor teórico que pode ser determinado a partir do modelo teórico para o qual foi considerada a configuração do TMD não sintonizado.
Para além dos testes de vibração ambiente com o sistema passivo do TMD, foram realizados testes preliminares com o modo de excitação ativa, apesar do estado de não sintonização do sistema TMD. A figura 12, à esquerda, mostra o histórico temporal das acelerações registadas no topo da torre. Após uma excitação sinusoidal inicial, o algoritmo para um nível de aceleração constante foi ativado para determinar experimentalmente a correlação entre a deflexão da torre e o deslocamento forçado da massa do TMD. O histórico temporal mostrado na Figura 12 mostra os dois cenários de teste no modo de excitação e os espectros FFT correspondentes mostram a resposta clara da torre nas suas duas frequências fundamentais (direção x e y). A secção temporal assinalada a verde é uma excitação sinusoidal da massa com controlo ativo inviabilizado que provocou uma resposta dinâmica em ambas as direções principais. O espectro FFT resultante exibe os dois picos para identificar as frequências fundamentais nestas duas direções. O segmento temporal assinalado a azul corresponde a uma excitação com controlo ativo viabilizado que causou um deslocamento mais constante da torre de forma predominante numa direção. A dissipação da vibração resultante após o modo de excitação ter sido desligado foi também utilizado para determinar o amortecimento estrutural e determinado como sendo D=2,4%. Este resultado está correlacionado com a taxa de amortecimento determinada com os algoritmos SSI.
10.0 Conclusão e Perspetivas
Foi instalado um TMD de Dupla Utilização na Torre de Testes Thyssen Krupp de 246 m de altura com o objetivo de excitar propositadamente a torre para se obter uma resposta dinâmica controlada nas suas frequências fundamentais. O objetivo desta excitação é conseguir uma oscilação definida do edifício nas duas direções principais da torre. Com base em cálculos numéricos, verificou-se que era necessária uma massa de 240 t do TMD para atingir o amortecimento suplementar necessário para o modo passivo e para gerar a força de controlo necessária para atingir um deslocamento do topo da torre de +/- 200 mm. Para criar um nível de deslocamento constante para o modo de excitação e para suprimir os deslocamentos causados pelo vento e a componente de vibração forçada na direção perpendicular, foi desenvolvido e testado um algoritmo de controle com simulações numéricas. Após a instalação do sistema do TMD do tipo pêndulo passivo, para o qual foram utilizadas placas pré-fabricadas de concreto como massa de reação, os atuadores foram colocados em funcionamento e foram realizados os testes iniciais. Os testes revelaram que o amortecimento inerente da torre era superior ao previsto, mas foi possível determinar claramente todos os modos relevantes. O modo de excitação ativa do edifício está a funcionar e podia ser testado, embora não em toda a sua extensão, para derivar todos os parâmetros de funcionamento, uma vez que o edifício ainda não está totalmente concluído. Devido ao estado prematuro do edifício, não foi possível adaptar o DTM passivo às frequências fundamentais determinadas.
Assim que o sistema TMD tiver sido adaptado, serão realizados mais testes ao edifício que incluirão também testes relativos ao amortecimento dependente da amplitude e à integridade do conceito de segurança.
REFERÊNCIAS
[1] Wenzel, H., Pichler, D., Schedler, R. (1991). “Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken”, Bauingenieur 74
[2] Döhler, M., Andersen, P.: Mevel, L. (2012). “Operational Modal Analysis using a Fast Stochastic Subspace Identification Method”, Conference Proceedings of the Society for Experimental Mechanics Series
[3] Soong, T.T., Spencer, J.R. (2000). “Active, Semi-Active and hybrid control of structures” In 12th World Conference for Earthquake Engineering
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: Nova Iorque, NI, EUA, 1990
[9] Preumont, A., Kazuto, S. (2008).”Active Control of Structures”, Wiley, Padstow
Compartilhar esta publicação






Outros Recursos
Precisa de mais informações sobre este tópico?
Não hesite em contactar-nos com a sua pergunta individual.
Um dos nossos engenheiros de projeto entrará em breve em contato.
Estudo de Caso sobre as Tecnologias de Amortecimento para Edifícios Altos: Conforto e Segurança
Council on Tall Buildings and Urban Habitat (CTBUH) Damping System Guidelines
Thyssen Krupp Test Tower, Rottweil/Alemanha
Dados do Projeto
- Ano de Conclusão:
2016 (colocação da última viga) - Construtor/Empreiteiro/Proprietário:
Krupp Hoesch Stahl GmbH/Thyssen Krupp Elevators - Engenheiro Projetista:
Werner Sobek com JAHN Architects Stuttgart and Chicago - Projetista de Estruturas:
Werner Sobek Stuttgart - Fornecedor do Sistema de Amortecimento:
GERB Vibration Control Systems - Laboratório de Testes:
Wacker Ingenieure (Wind Engineering / Wind Tunnel Tests) - Altura/Altura entre Andares:
246 m/3,3 m (pé-direito do escritório) - Andares:
27 Níveis / 8 Andares para Escritórios - Área Bruta da Torre:
340 metros quadrados - Função de Construção:
Torre de Testes de Elevadores/Escritórios/Plataforma de Observação (232 m) - Estratégia de Amortecimento Utilizada:
Sistema de Amortecedor de Massa Híbrido (240 t)
- Material Estrutural:
Concreto Armado (C50/60) / Fachada de Membrana de PTFE sobre uma estrutura de aço - Sistema Estrutural:
Núcleo de Concreto Armado em Cantiléver sobre um Ensoleiramento Geral
(- 32 m)
Estudo de Caso sobre as Tecnologias de Amortecimento para Edifícios Altos: Conforto e Segurança
Council on Tall Buildings and Urban Habitat (CTBUH) Damping System Guidelines
Thyssen Krupp Test Tower, Rottweil/Alemanha
Dados do Projeto
- Ano de Conclusão: 2016 (colocação da última viga)
- Construtor/Empreiteiro/Proprietário: Krupp Hoesch Stahl GmbH/Thyssen Krupp Elevators
- Engenheiro Projetista: Werner Sobek com JAHN Architects Stuttgart and Chicago
- Projetista de estruturas: Werner Sobek Stuttgart
- Fornecedor do Sistema de Amortecimento: GERB Vibration Control Systems
- Laboratório de Testes: Wacker Ingenieure (Wind Engineering / Wind Tunnel Tests)
- Altura/Altura entre Andares: 246 m/3,3 m (pé-direito do escritório)
- Andares: 27 Pisos / 8 Andares para Escritórios
- Área Bruta da Torre: 340 metros quadrados
- Função de Construção: Torre de Testes de Elevadores/Escritórios/Plataforma de Observação (232 m)
- Material Estrutural: Concreto Armado (C50/60)/Fachada de Membrana de PTFE sobre uma estrutura de aço
- Sistema Estrutural: Núcleo de Concreto Armado em Cantiléver sobre um Ensoleiramento Geral (- 32 m)
- Estratégia de Amortecimento Utilizada: Sistema de Amortecedor de Massa Híbrido (240 t)
1.0 Introdução/Histórico
Ergueu-se uma torre de 246 m de altura no Sudoeste da Alemanha com o objetivo de acomodar uma instalação de testes para inovações em elevadores. A torre tem uma área útil circular com um diâmetro de 20 m e espaço para 9 poços de elevador de teste, um elevador de emergência em caso de incêndio e um elevador com vista panorâmica de vidro. Além disso, é projetado um poço de 220 m para ser utilizado como poço de elevação mecânica para assegurar os programas de teste.
A base da torre tem um diâmetro de 40 m, o que proporciona espaço adicional para instalações de serviço, um átrio e um centro educativo. A uma altura de 232 m, uma plataforma de observação, a mais alta da Alemanha, possibilita uma vista espetacular para a Floresta Negra e mesmo para os Alpes, em dias claros.
2.0 Sistema Estrutural
O sistema estrutural da Torre de Testes consiste basicamente num tubo de concreto armado com um diâmetro de 20,8 m, que é fixado a 30 metros de profundidade no solo circundante (ver Figura 2). Até aos 110 m de altura, o tubo tem uma espessura de 40 cm e, daí para cima, de 25 cm. O solo, constituído por uma camada de Keuper e calcário conquífero subjacente, proporciona uma elevada capacidade de suporte, pelo que não foi necessária uma fundação com estacas. Para além da fixação no solo circundante, a estrutura mais larga da base da torre proporciona uma rigidez lateral adicional.
O endurecimento interno do tubo de concreto resulta principalmente das paredes internas dos poços dos elevadores. Apenas a determinados níveis de altura foram instaladas placas pré-fabricadas no teto, de forma a permitir o acesso aos poços dos elevadores. Alguns dos poços dos elevadores terminam a uma altura de 115 m e são cobertos por pavimentos de 40 cm de espessura de vão longo que foram moldados no local. Estes pavimentos são utilizados para espaços de escritório. Acima, um espaço vazio que se estende até aos 197 m é utilizado como um reservatório de calor e para o sistema TMD. A parte superior da torre é utilizada para os espaços de escritório e para os restantes poços de elevador.
Uma caraterística distintiva da Torre de Testes é a fachada têxtil que consiste numa malha de fibra de vidro revestida com PTFE. A largura da abertura da malha aumenta com a altura do edifício para aumentar a translucidez da fachada, diminuir a densidade e o peso do material e também para efeitos aerodinâmicos.
A forma em espiral da fachada destina-se a funcionar como uma espiral de Scruton e o próprio tecido ajuda a proteger a estrutura de concreto para evitar tensões térmicas provocadas pela radiação solar. Para o design da fachada e a escolha dos aspetos materiais da instalação, a manutenção e a durabilidade, bem como a carga de vento, tiveram de ser considerados.
3.0 Método de Construção
A construção da Torre de Testes foi feita de acordo com os seguintes passos:
- Escavação de um fosso de construção circular de 30 m para a base da torre. A escavação e a forma foram obtidas através de uma detonação inicial. Após a escavação, o fosso foi fixado com ferros no solo e revestimento de concreto projetado.
- Colocação do ensoleiramento geral
- Construção da estrutura vertical de concreto utilizando a cofragem deslizante. Todas as paredes foram construídas continuamente durante um período de 4 meses
- Construção das placas para o pavimento
- Construção da zona de entrada.
4.0 Resposta Dinâmica Prevista à carga de vento
Previa-se que as frequências fundamentais para a Torre de Testes estivessem no intervalo de 0,17 Hz – 0,20 Hz segundos, dependendo da fase de construção e do estado do concreto (com/sem fissuras) – ver Figura 4.
A análise do vento revelou que a excitação ressonante da estrutura pode ocorrer a velocidades do vento que correspondem aos valores do solo (a uma altura de 10 m) no intervalo de 55 – 60 km/h. Previa-se que, sem amortecimento adicional, esta excitação ressonante causasse deflexões do topo da estrutura de cerca de +/- 750 mm, que não só causariam desconforto aos ocupantes como também teriam implicações de fadiga significativas na vida útil da estrutura de concreto da torre (ver Figura 5). Para reduzir a resposta dinâmica à excitação provocada por ventos cruzados, foi implementado um Sistema de Amortecimento Passivo de Massa Sintonizada. Uma vez que a torre deve ser utilizada como torre de testes para a construção de equipamento de elevador sensíveis à oscilação, o proprietário andava à procura de uma possibilidade de excitar artificialmente a torre em dias calmos, embora com deslocamentos que não causassem quaisquer problemas de fadiga. A altura solicitada para o movimento de oscilação artificial estava situada no intervalo de aproximadamente +/- 200 mm, o qual foi considerado seguro. Este pedido proporcionou a rara oportunidade de implementar um Amortecedor de Massa Híbrido (HMD) ou, uma vez que o sistema de design diverge de outros sistemas de HMD que foram produzidos anteriormente, um chamado TMD de Dupla Utilização. O sistema deve ser apresentado nos capítulos seguintes, incluindo a otimização do sistema passivo, o design do mecanismo dos atuadores, os algoritmos de controle e o conceito de segurança.
5.0 Otimização do Sistema Passivo de Amortecedor de Massa Sintonizada
Os parâmetros do sistema TMD passivo tiveram de ser determinados considerando três aspetos diferentes a) proporcionar um amortecimento estrutural adicional suficiente para reduzir a resposta dinâmica devido à excitação por desprendimento de vórtices, b) limitar o curso da massa principal do TMD resultante no modo passivo a um valor tangível/viável, para situações de rajadas de vento cruzado e c) escolher a massa do TMD de acordo com a introdução de energia necessária para a deflexão máxima desejada da torre no modo de excitação, considerando a envolvente de desempenho ativada pelos atuadores fornecidos (isto é, força máxima gerada e curso máximo durante a operação). Para otimizar o sistema do TMD, foi utilizado um modelo numérico que representava a distribuição da massa da torre, e os momentos de inércia da massa, conforme relatado nas propriedades estruturais identificadas. Os elementos de rigidez entre os pisos foram também adaptados para corresponderem às formas e frequências naturais das observações em escala real. A figura 6 (à esquerda) mostra as formas de modo e as frequências naturais deste modelo análogo utilizado. A figura 6 (à esquerda) também compara as formas de modo do modelo análogo com as formas do modelo detalhado que foi preparado pelo consultor estrutural.
Além disso, o TMD foi discretamente modelado como um sistema de pêndulo ao capturar também a sua posição excêntrica na torre. As características de carga para o caso introduzido aplicável, ou seja, a excitação ressonante devido ao desprendimento de vórtices, são muito semelhantes às de uma única excitação harmônica. No entanto, a carga de rajadas coexistentes é inerentemente de natureza estocástica e, para tal, aplicam-se outros critérios de otimização diferentes do reconhecido critério de Den Hartog. Além disso, os deslocamentos relativos da massa do TMD são maiores para uma carga do tipo estocástico do que para uma carga de tipo harmônico. Uma vez que para a determinação numérica dos parâmetros ideais do TMD deve ser considerada uma carga próxima da realidade, foi gerado um historial temporal que incluiu tanto a carga de rajada estocástica (baseada no espetro de Davenport) como um componente ressonante sobreposto, semelhante a um desprendimento de vórtice, para representar a excitação geral do vento cruzado (ver Fig. 3 – à direita). A redução da deflexão da torre que pode ser alcançada com o sistema TMD passivo otimizado, bem como os deslocamentos resultantes do TMD, são mostrados na Fig. 3 – à direita.
Com base nestes resultados para um amortecimento estrutural inerente estimado em ξ=0,8 %, determinou-se que era necessária uma massa de TMD de 240 t para manter os deslocamentos dentro de +/- 650 mm, mantendo simultaneamente uma taxa ótima de amortecimento do TMD para o desempenho ideal do TMD. Um aumento do amortecimento do TMD poderia ter reduzido o curso, embora a eficácia ainda teria sido suficiente, mas isso teria afetado negativamente os requisitos de força do atuador. Para determinar as forças necessárias para a configuração ótima de 240 t do TMD, o modelo análogo foi também utilizado para verificar que, com uma força máxima de 40 kN a partir dos atuadores, as deflexões da torre podem ser alcançadas no intervalo de +/- 200 mm. A figura 4 mostra os resultados de uma simulação numérica de domínio temporal no modelo numérico análogo; para isso, são mostrados as deflexões resultantes do topo da torre, as deflexões de massa do TMD e as forças ativas de introdução que as provocam.
6.0 Descrição do sistema de controle
A dualidade do sistema de controle serve a) o propósito de um consumo reduzido de energia, enquanto estiver em funcionamento passivo normal, para reduzir as vibrações ocorridas b) o propósito de requisitos reduzidos de força para os atuadores, utilizando efeitos de ressonância de modo a excitar a massa principal do TMD para, por fim, atingir o requisito de força real. Assim, em comparação com outros sistemas de controle (ver Figura 1), os atuadores ligam a estrutura principal e a massa do TMD mas não são utilizados para controlar diretamente a massa do TMD, como seria o caso de um típico Sistema Ativo de Acionador/Amortecedor de Massa.
Para o TMD de Dupla Utilização implementado, foi escolhida uma massa de reação para a operação passiva de 240 toneladas. Para o modo de operação de excitação, dois acionamentos lineares – um em cada direção principal – estão ligados à massa do TMD com pivôs próximos do centro de gravidade da massa para evitar qualquer artefacto de torção. Cada acionador linear pode fornecer forças até 40 kN dentro de um curso máximo. +/- 600 mm (ver detalhe na Fig. 2). Os acionamentos lineares podem ser desencaixados para que todo o modo passivo não seja influenciado pelos rolamentos dos atuadores para o caso improvável de uma falha dos rolamentos.
Figura 10 – Tipos de Sistemas de Controle – TMD de Dupla Utilização em comparação com sistemas passivos, semi-ativos, ativos e híbridos
O sistema é instrumentado com quatro acelerômetros uniaxiais (K-Beam/MEMS sísmicos; um em cada direção) para determinar o nível superior da torre e as acelerações de massa do TMD. Os sinais de aceleração estão a ser filtrados num filtro passa-banda dentro do intervalo de frequências das frequências naturais fundamentais da torre (0,1 – 0,3 Hz) e integrados para obter as velocidades e deflexões da torre.
Além disso, os valores de deslocamento integrado podem ser comparados com os de um Sistema Global de Navegação por Satélite de cortesia instalado também no topo da estrutura para comparação de desvios de sinal. Foi efetuado um teste inicial de correlação em conformidade. Além do mais, os deslocamentos do TMD são monitorizados diretamente com potenciómetros de cabo e um sistema de medição indutivo de comprimento integrado nos motores lineares.
7.0 Algoritmo de controle
O circuito de controle geral da torre é apresentado na Fig. 5, que ilustra a sequência de controlo em circuito fechado. Um design detalhado do algoritmo de controle exigiria modelos analíticos da interação entre os atuadores e a massa do TMD para determinar a ligação entre a introdução do atuador e a força de ação aplicada. Estes devem combinar-se com o modelo analítico da estrutura principal que descreve o comportamento dinâmico global do edifício. Além disso, em comparação com os algoritmos de controle padrão que foram aplicados a outras aplicações do HMD, como em [2],[3] ou teoricamente investigados, como [1] no algoritmo de controle para esta aplicação de torre, teve de ser considerada a excitação controlada sincronizada numa direção principal e a redução da vibração na direção perpendicular. Uma vez que a resposta dinâmica é majoritariamente esperada nos modos fundamentais, o controle do feedback linear com todos os seus benefícios para evitar instabilidades poderia ser aplicado para ambas as tarefas. Para a simples realização de controle praticada, o controle de feedback linear, que atenua a resposta dinâmica perpendicular à excitação da torre, aciona o atuador correspondente através de uma soma linear ponderada especificada de sete medições dinâmicas estruturais. Estas medições são: Das acelerações do TMD e do topo da torre, das velocidades do TMD e do topo da torre, dos deslocamentos do TMD e do topo da torre, e do deslocamento relativo do TMD e do topo da torre.
É importante realçar que os fatores de ponderação pré-selecionados são ganhos em escala simples, positivos ou negativos. A parametrização dos fatores de ponderação baseia-se nos testes dinâmicos da torre, não estando a utilizar qualquer modificação dependente da frequência. O feedback do atuador ativo é calculado instantaneamente (a 50 Hz), e é novamente uma combinação linear das medições dinâmicas anteriores. Não há qualquer utilização de manipulação não linear. O design do controle também foi implementado numa simulação numérica no domínio do tempo (ou seja, integração direta) para evidenciar o desempenho da atenuação de vibração do controlo do acionador. Para o modo de excitação, foi utilizada a mesma abordagem de controle em combinação com um desvio de deslocamento que representa a excitação da torre para o valor de deslocamento pretendido. O desvio é uma função sinusoidal baseada na frequência fundamental detetada de cada direção. A saída de controle para contrariar a variação do deslocamento do topo devido a outras perturbações é depois modulada na função de desvio sinusoidal e o valor de controle é adaptado em conformidade.
O controle de feedback linear de redução da resposta dinâmica da torre perpendicular à excitação permite que o comando de força para o atuador seja uma soma linear ponderada especificada das sete medições dinâmicas do programa. As sete medições são: Da aceleração do TMD e da torre, da velocidade do TMD e da torre, do deslocamento do TMD e da torre, e do deslocamento relativo do TMD e da torre. É importante realçar que os fatores de ponderação são valores em escala simples, positivos ou negativos. A parametrização do fator de ponderação baseia-se em testes experimentais dinâmicos da torre. O feedback do atuador que está ativo é calculado instantaneamente (50 Hz)
e os fatores de ponderação são em escala, sendo que não utilizam qualquer forma de função de transferência dependente da frequência. Além disso, o feedback é uma combinação linear da propriedade dinâmica. Não há qualquer utilização de manipulação ou lógica não linear. O design de controle foi implementado para uma simulação numérica no domínio temporal (integração direta) de modo a que, para cada passo temporal, a introdução de força para a massa do TMD como controlo do atuador possa ser adaptada. A figura 12 mostra os resultados da simulação para a supressão de vibrações – os deslocamentos da torre e o curso resultante da massa do TMD.
Para o modo de excitação, foi utilizada a mesma abordagem de controlo em combinação com um desvio que representa a excitação da torre para um valor de deslocamento pretendido. O desvio é uma função sinusoidal baseada na frequência fundamental detetada de cada direção. A saída de controlo para contrariar a variação do deslocamento do topo devido à perturbação é depois modulada na função de desvio
Sinusoidal e o valor de controlo tem de ser adaptado em conformidade. Para este desvio, foi determinado experimentalmente um fator de ponderação. A figura 13 mostra os resultados numéricos com perturbação da carga de rajada de vento para o modo de excitação com uma simples excitação sinusoidal e com um algoritmo de controlo aplicado.
8.0 Conceito de segurança
Tendo em consideração a força de +/- 40 kN que pode ser fornecida pelos acionamentos lineares que são utilizados como atuadores, é indispensável um conceito de segurança para assegurar que os deslocamentos da torre não excedam as disposições de fadiga. Isto aplica-se mesmo que a saída de força não seja suficiente para causar deflexões do topo superiores aos +/-200 mm pré-determinados. Uma abordagem para aumentar a segurança do sistema foi aumentar a redundância dos sensores de monitorização que estão a registar a deflexão do topo da torre. Isto pode ser alcançado da melhor forma através da implementação de um sistema de monitorização independente adicional que, idealmente, utiliza um princípio de medição diferente do hardware de controlo existente. Para o projeto aqui apresentado, o hardware de controle utilizou, conforme referido, acelerómetros e um limiar de aceleração definido para a filtragem de sinais com filtro passa-banda dentro do intervalo de frequências naturais relevantes da estrutura. O principal sistema de monitorização superordenada é um Sistema Global de Navegação por Satélite (GNSS) com uma precisão de +/- 10 mm. O sistema GNNS requer uma estação básica de referência que esteja a processar os dados de coordenadas para os valores existentes de resposta ao deslocamento. Se o deslocamento do topo da torre exceder um limiar pré-determinado durante o modo de excitação artificial, que pode dever-se a um acréscimo de vento ou a outra excitação, um relé irá comutar o sinal de presença para 0 V. Isto provocará a interrupção do modo de excitação. Adicionalmente, ambos os sistemas de monitorização estão constantemente a verificar os dados adquiridos para detectar sinais de sensores defeituosos, o que também resultará na interrupção do modo de excitação ativo. Os sinais defeituosos de aceleração/potenciómetro de cabo serão detetados por um critério de seleção de pico espetral – apenas se for possível a seleção de picos num intervalo relevante, pode assumir-se que os sensores fornecem sinais legítimos. Enquanto o sistema GNNS analisa a alteração dos dados das coordenadas, se os dados amostrados não se alterarem a tempo, assume-se automaticamente que existe um sinal defeituoso.
9.0 Testes de Vibração
Os testes iniciais de vibração da torre foram executado na fase atual, na qual a torre ainda não está concluída, pelo que as frequências fundamentais da torre nesta fase estão acima do intervalo de sintonização especificada do sistema passivo do TMD. O TMD é ajustado para a maior frequência de sintonização possível. O objetivo dos testes de vibração foi a determinação das frequências fundamentais da torre com o sistema TMD bloqueado, bem como o amortecimento estrutural inerente. Além disso, o comportamento dinâmico com o sistema passivo do TMD acionado deve ser determinado, bem como o aumento do amortecimento estrutural devido ao sistema passivo do TMD. Para identificar as frequências naturais fundamentais da torre, o Método da Densidade Espetral de Potência Normalizada Média (ANPSD) [1] pode ser utilizado. Para isso, os históricos temporais registados têm de ser separados em segmentos. Estes segmentos têm de ser transformados no domínio da frequência. Os espectros resultantes têm de ser normalizados, calculados como média e multiplicados com os espetros conjugados complexos.
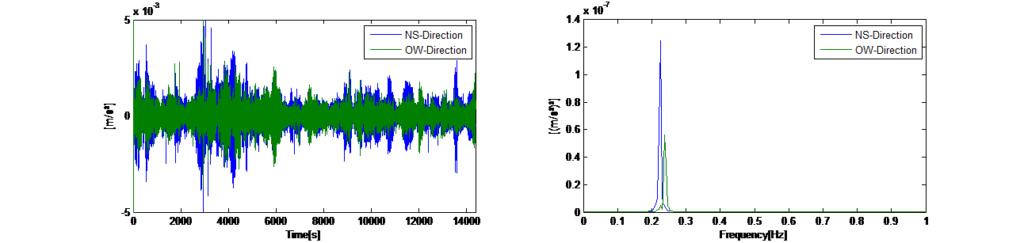
Ao fazê-lo, todas as vibrações aleatórias serão eliminadas e apenas as vibrações livres recorrentes da estrutura serão exibidas no espectro médio, que agora representa as frequências naturais predominantemente excitadas da torre. A figura 14, à esquerda, mostra os históricos temporais registados das vibrações ambientais horizontais nas direções x e y com o TMD bloqueado. A figura 14, à direita, mostra a média dos Espectros de Potência Automática resultantes para um comprimento de segmento de 120 segundos. Os espectros mostram que a torre apresenta uma resposta dinâmica a duas frequências dominantes (0,225 Hz na direção x e 0,245 Hz na direção y).
Para além do Método do Espectro de Potência Média acima descrito, que assume que a excitação ambiente provoca uma resposta dinâmica suficiente nos modos de vibração de interesse para obter segurança estocástica, as frequências naturais foram determinadas utilizando o software de processamento de sinais comerciais ARTEMIS, [1] que incorpora os Métodos de Identificação do Subespaço Estocástico e de Decomposição Melhorada do Domínio da Frequência.
A Decomposição Melhorada do Domínio da Frequência (EFDD) e a Identificação do Subespaço Estocástico são técnicas vastamente utilizadas para a identificação de parâmetros modais apenas de saída.
O método EFDD baseia-se no cálculo dos espectros de resposta. São, portanto, necessários registos extensos para manter um nível reduzido de erros na estimativa do espectro e para extrair parâmetros modais de uma forma fiável. O algoritmo de identificação do subespaço estocástico foi aplicado para identificar pontes através da utilização de um modelo apenas de saída. Os métodos de identificação do subespaço estocástico funcionam no domínio temporal e baseiam-se numa descrição do espaço para o estado do problema dinâmico. Os resultados da identificação do sistema em diferentes ordens de modelos são comparados para distinguir os verdadeiros modos estruturais dos modos espúrios nos chamados diagramas de estabilização. Estes diagramas são uma forma popular de selecionar o modelo do sistema identificado, uma vez que os verdadeiros modos estruturais tendem a ser estáveis para ordens de modelos sucessivos, cumprindo certos critérios de estabilização que são avaliados num procedimento automático. A figura 15 mostra um cartão de estabilidade resultante para os dados ambientais registados, a partir do qual os modos relevantes podem ser determinados. Os modos identificados e as taxas de amortecimento determinadas para cada modo no estado com TMD bloqueado (à esquerda) e com o TMD ativado (à direita) também são mostrados na Figura 14. Pode ser observado um aumento do amortecimento estrutural. O amortecimento estrutural adicional encontra-se no intervalo de um valor teórico que pode ser determinado a partir do modelo teórico para o qual foi considerada a configuração do TMD não sintonizado.
Para além dos testes de vibração ambiente com o sistema passivo do TMD, foram realizados testes preliminares com o modo de excitação ativa, apesar do estado de não sintonização do sistema TMD. A figura 12, à esquerda, mostra o histórico temporal das acelerações registadas no topo da torre. Após uma excitação sinusoidal inicial, o algoritmo para um nível de aceleração constante foi ativado para determinar experimentalmente a correlação entre a deflexão da torre e o deslocamento forçado da massa do TMD. O histórico temporal mostrado na Figura 12 mostra os dois cenários de teste no modo de excitação e os espectros FFT correspondentes mostram a resposta clara da torre nas suas duas frequências fundamentais (direção x e y). A secção temporal assinalada a verde é uma excitação sinusoidal da massa com controlo ativo inviabilizado que provocou uma resposta dinâmica em ambas as direções principais. O espectro FFT resultante exibe os dois picos para identificar as frequências fundamentais nestas duas direções. O segmento temporal assinalado a azul corresponde a uma excitação com controlo ativo viabilizado que causou um deslocamento mais constante da torre de forma predominante numa direção. A dissipação da vibração resultante após o modo de excitação ter sido desligado foi também utilizado para determinar o amortecimento estrutural e determinado como sendo D=2,4%. Este resultado está correlacionado com a taxa de amortecimento determinada com os algoritmos SSI.
10.0 Conclusão e Perspetivas
Foi instalado um TMD de Dupla Utilização na Torre de Testes Thyssen Krupp de 246 m de altura com o objetivo de excitar propositadamente a torre para se obter uma resposta dinâmica controlada nas suas frequências fundamentais. O objetivo desta excitação é conseguir uma oscilação definida do edifício nas duas direções principais da torre. Com base em cálculos numéricos, verificou-se que era necessária uma massa de 240 t do TMD para atingir o amortecimento suplementar necessário para o modo passivo e para gerar a força de controlo necessária para atingir um deslocamento do topo da torre de +/- 200 mm. Para criar um nível de deslocamento constante para o modo de excitação e para suprimir os deslocamentos causados pelo vento e a componente de vibração forçada na direção perpendicular, foi desenvolvido e testado um algoritmo de controle com simulações numéricas. Após a instalação do sistema do TMD do tipo pêndulo passivo, para o qual foram utilizadas placas pré-fabricadas de concreto como massa de reação, os atuadores foram colocados em funcionamento e foram realizados os testes iniciais. Os testes revelaram que o amortecimento inerente da torre era superior ao previsto, mas foi possível determinar claramente todos os modos relevantes. O modo de excitação ativa do edifício está a funcionar e podia ser testado, embora não em toda a sua extensão, para derivar todos os parâmetros de funcionamento, uma vez que o edifício ainda não está totalmente concluído. Devido ao estado prematuro do edifício, não foi possível adaptar o DTM passivo às frequências fundamentais determinadas.
Assim que o sistema TMD tiver sido adaptado, serão realizados mais testes ao edifício que incluirão também testes relativos ao amortecimento dependente da amplitude e à integridade do conceito de segurança.
REFERÊNCIAS
[1] Wenzel, H., Pichler, D., Schedler, R. (1991). “Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken”, Bauingenieur 74
[2] Döhler, M., Andersen, P.: Mevel, L. (2012). “Operational Modal Analysis using a Fast Stochastic Subspace Identification Method”, Conference Proceedings of the Society for Experimental Mechanics Series
[3] Soong, T.T., Spencer, J.R. (2000). “Active, Semi-Active and hybrid control of structures” In 12th World Conference for Earthquake Engineering
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: Nova Iorque, NI, EUA, 1990
[9] Preumont, A., Kazuto, S. (2008).”Active Control of Structures”, Wiley, Padstow
1.0 Introdução/ Histórico
Ergueu-se uma torre de 246 m de altura no Sudoeste da Alemanha com o objetivo de acomodar uma instalação de testes para inovações em elevadores. A torre tem uma área útil circular com um diâmetro de 20 m e espaço para 9 poços de elevador de teste, um elevador de emergência em caso de incêndio e um elevador com vista panorâmica de vidro. Além disso, é projetado um poço de 220 m para ser utilizado como poço de elevação mecânica para assegurar os programas de teste.
A base da torre tem um diâmetro de 40 m, o que proporciona espaço adicional para instalações de serviço, um átrio e um centro educativo. A uma altura de 232 m, uma plataforma de observação, a mais alta da Alemanha, possibilita uma vista espetacular para a Floresta Negra e mesmo para os Alpes, em dias claros.
2.0 Sistema Estrutural
O sistema estrutural da Torre de Testes consiste basicamente num tubo de concreto armado com um diâmetro de 20,8 m, que é fixado a 30 metros de profundidade no solo circundante (ver Figura 2). Até aos 110 m de altura, o tubo tem uma espessura de 40 cm e, daí para cima, de 25 cm. O solo, constituído por uma camada de Keuper e calcário conquífero subjacente, proporciona uma elevada capacidade de suporte, pelo que não foi necessária uma fundação com estacas. Para além da fixação no solo circundante, a estrutura mais larga da base da torre proporciona uma rigidez lateral adicional.
O endurecimento interno do tubo de concreto resulta principalmente das paredes internas dos poços dos elevadores. Apenas a determinados níveis de altura foram instaladas placas pré-fabricadas no teto, de forma a permitir o acesso aos poços dos elevadores. Alguns dos poços dos elevadores terminam a uma altura de 115 m e são cobertos por pavimentos de 40 cm de espessura de vão longo que foram moldados no local. Estes pavimentos são utilizados para espaços de escritório. Acima, um espaço vazio que se estende até aos 197 m é utilizado como um reservatório de calor e para o sistema TMD. A parte superior da torre é utilizada para os espaços de escritório e para os restantes poços de elevador.
Uma caraterística distintiva da Torre de Testes é a fachada têxtil que consiste numa malha de fibra de vidro revestida com PTFE. A largura da abertura da malha aumenta com a altura do edifício para aumentar a translucidez da fachada, diminuir a densidade e o peso do material e também para efeitos aerodinâmicos.
A forma em espiral da fachada destina-se a funcionar como uma espiral de Scruton e o próprio tecido ajuda a proteger a estrutura de concreto para evitar tensões térmicas provocadas pela radiação solar. Para o design da fachada e a escolha dos aspetos materiais da instalação, a manutenção e a durabilidade, bem como a carga de vento, tiveram de ser considerados.
3.0 Método de Construção
A construção da Torre de Testes foi feita de acordo com os seguintes passos:
- Escavação de um fosso de construção circular de 30 m para a base da torre. A escavação e a forma foram obtidas através de uma detonação inicial. Após a escavação, o fosso foi fixado com ferros no solo e revestimento de concreto projetado.
- Colocação do ensoleiramento geral
- Construção da estrutura vertical de concreto utilizando a cofragem deslizante. Todas as paredes foram construídas continuamente durante um período de 4 meses
- Construção das placas para o pavimento
- Construção da zona de entrada.
4.0 Resposta Dinâmica Prevista à carga de vento
Previa-se que as frequências fundamentais para a Torre de Testes estivessem no intervalo de 0,17 Hz – 0,20 Hz segundos, dependendo da fase de construção e do estado do concreto (com/sem fissuras) – ver Figura 4.
A análise do vento revelou que a excitação ressonante da estrutura pode ocorrer a velocidades do vento que correspondem aos valores do solo (a uma altura de 10 m) no intervalo de 55 – 60 km/h. Previa-se que, sem amortecimento adicional, esta excitação ressonante causasse deflexões do topo da estrutura de cerca de +/- 750 mm, que não só causariam desconforto aos ocupantes como também teriam implicações de fadiga significativas na vida útil da estrutura de concreto da torre (ver Figura 5). Para reduzir a resposta dinâmica à excitação provocada por ventos cruzados, foi implementado um Sistema de Amortecimento Passivo de Massa Sintonizada. Uma vez que a torre deve ser utilizada como torre de testes para a construção de equipamento de elevador sensíveis à oscilação, o proprietário andava à procura de uma possibilidade de excitar artificialmente a torre em dias calmos, embora com deslocamentos que não causassem quaisquer problemas de fadiga. A altura solicitada para o movimento de oscilação artificial estava situada no intervalo de aproximadamente +/- 200 mm, o qual foi considerado seguro. Este pedido proporcionou a rara oportunidade de implementar um Amortecedor de Massa Híbrido (HMD) ou, uma vez que o sistema de design diverge de outros sistemas de HMD que foram produzidos anteriormente, um chamado TMD de Dupla Utilização. O sistema deve ser apresentado nos capítulos seguintes, incluindo a otimização do sistema passivo, o design do mecanismo dos atuadores, os algoritmos de controle e o conceito de segurança.
5.0 Otimização do Sistema Passivo de Amortecedor de Massa Sintonizada
Os parâmetros do sistema TMD passivo tiveram de ser determinados considerando três aspetos diferentes a) proporcionar um amortecimento estrutural adicional suficiente para reduzir a resposta dinâmica devido à excitação por desprendimento de vórtices, b) limitar o curso da massa principal do TMD resultante no modo passivo a um valor tangível/viável, para situações de rajadas de vento cruzado e c) escolher a massa do TMD de acordo com a introdução de energia necessária para a deflexão máxima desejada da torre no modo de excitação, considerando a envolvente de desempenho ativada pelos atuadores fornecidos (isto é, força máxima gerada e curso máximo durante a operação). Para otimizar o sistema do TMD, foi utilizado um modelo numérico que representava a distribuição da massa da torre, e os momentos de inércia da massa, conforme relatado nas propriedades estruturais identificadas. Os elementos de rigidez entre os pisos foram também adaptados para corresponderem às formas e frequências naturais das observações em escala real. A figura 6 (à esquerda) mostra as formas de modo e as frequências naturais deste modelo análogo utilizado. A figura 6 (à esquerda) também compara as formas de modo do modelo análogo com as formas do modelo detalhado que foi preparado pelo consultor estrutural.
Além disso, o TMD foi discretamente modelado como um sistema de pêndulo ao capturar também a sua posição excêntrica na torre. As características de carga para o caso introduzido aplicável, ou seja, a excitação ressonante devido ao desprendimento de vórtices, são muito semelhantes às de uma única excitação harmônica. No entanto, a carga de rajadas coexistentes é inerentemente de natureza estocástica e, para tal, aplicam-se outros critérios de otimização diferentes do reconhecido critério de Den Hartog. Além disso, os deslocamentos relativos da massa do TMD são maiores para uma carga do tipo estocástico do que para uma carga de tipo harmônico. Uma vez que para a determinação numérica dos parâmetros ideais do TMD deve ser considerada uma carga próxima da realidade, foi gerado um historial temporal que incluiu tanto a carga de rajada estocástica (baseada no espetro de Davenport) como um componente ressonante sobreposto, semelhante a um desprendimento de vórtice, para representar a excitação geral do vento cruzado (ver Fig. 3 – à direita). A redução da deflexão da torre que pode ser alcançada com o sistema TMD passivo otimizado, bem como os deslocamentos resultantes do TMD, são mostrados na Fig. 3 – à direita. Com base nestes resultados para um amortecimento estrutural inerente estimado em ξ=0,8 %, determinou-se que era necessária uma massa de TMD de 240 t para manter os deslocamentos dentro de +/- 650 mm, mantendo simultaneamente uma taxa ótima de amortecimento do TMD para o desempenho ideal do TMD. Um aumento do amortecimento do TMD poderia ter reduzido o curso, embora a eficácia ainda teria sido suficiente, mas isso teria afetado negativamente os requisitos de força do atuador. Para determinar as forças necessárias para a configuração ótima de 240 t do TMD, o modelo análogo foi também utilizado para verificar que, com uma força máxima de 40 kN a partir dos atuadores, as deflexões da torre podem ser alcançadas no intervalo de +/- 200 mm. A figura 4 mostra os resultados de uma simulação numérica de domínio temporal no modelo numérico análogo; para isso, são mostrados as deflexões resultantes do topo da torre, as deflexões de massa do TMD e as forças ativas de introdução que as provocam.
6.0 Descrição do sistema de controle
A dualidade do sistema de controle serve a) o propósito de um consumo reduzido de energia, enquanto estiver em funcionamento passivo normal, para reduzir as vibrações ocorridas b) o propósito de requisitos reduzidos de força para os atuadores, utilizando efeitos de ressonância de modo a excitar a massa principal do TMD para, por fim, atingir o requisito de força real. Assim, em comparação com outros sistemas de controlo (ver Figura 1), os atuadores ligam a estrutura principal e a massa do TMD mas não são utilizados para controlar diretamente a massa do TMD, como seria o caso de um típico Sistema Ativo de Acionador/Amortecedor de Massa. Para o TMD de Dupla Utilização implementado, foi escolhida uma massa de reação para a operação passiva de 240 toneladas. Para o modo de operação de excitação, dois acionamentos lineares – um em cada direção principal – estão ligados à massa do TMD com pivôs próximos do centro de gravidade da massa para evitar qualquer artefacto de torção. Cada acionador linear pode fornecer forças até 40 kN dentro de um curso máximo. +/- 600 mm (ver detalhe na Fig. 2). Os acionamentos lineares podem ser desencaixados para que todo o modo passivo não seja influenciado pelos rolamentos dos atuadores para o caso improvável de uma falha dos rolamentos.
O sistema é instrumentado com quatro acelerômetros uniaxiais (K-Beam/MEMS sísmicos; um em cada direção) para determinar o nível superior da torre e as acelerações de massa do TMD. Os sinais de aceleração estão a ser filtrados num filtro passa-banda dentro do intervalo de frequências das frequências naturais fundamentais da torre (0,1 – 0,3 Hz) e integrados para obter as velocidades e deflexões da torre. Além disso, os valores de deslocamento integrado podem ser comparados com os de um Sistema Global de Navegação por Satélite de cortesia instalado também no topo da estrutura para comparação de desvios de sinal. Foi efetuado um teste inicial de correlação em conformidade. Além do mais, os deslocamentos do TMD são monitorizados diretamente com potenciómetros de cabo e um sistema de medição indutivo de comprimento integrado nos motores lineares.
7.0 Algoritmo de controle
O circuito de controle geral da torre é apresentado na Fig. 5, que ilustra a sequência de controlo em circuito fechado. Um design detalhado do algoritmo de controle exigiria modelos analíticos da interação entre os atuadores e a massa do TMD para determinar a ligação entre a introdução do atuador e a força de ação aplicada. Estes devem combinar-se com o modelo analítico da estrutura principal que descreve o comportamento dinâmico global do edifício. Além disso, em comparação com os algoritmos de controle padrão que foram aplicados a outras aplicações do HMD, como em [2],[3] ou teoricamente investigados, como [1] no algoritmo de controle para esta aplicação de torre, teve de ser considerada a excitação controlada sincronizada numa direção principal e a redução da vibração na direção perpendicular. Uma vez que a resposta dinâmica é majoritariamente esperada nos modos fundamentais, o controle do feedback linear com todos os seus benefícios para evitar instabilidades poderia ser aplicado para ambas as tarefas. Para a simples realização de controle praticada, o controle de feedback linear, que atenua a resposta dinâmica perpendicular à excitação da torre, aciona o atuador correspondente através de uma soma linear ponderada especificada de sete medições dinâmicas estruturais. Estas medições são: Das acelerações do TMD e do topo da torre, das velocidades do TMD e do topo da torre, dos deslocamentos do TMD e do topo da torre, e do deslocamento relativo do TMD e do topo da torre. É importante realçar que os fatores de ponderação pré-selecionados são ganhos em escala simples, positivos ou negativos. A parametrização dos fatores de ponderação baseia-se nos testes dinâmicos da torre, não estando a utilizar qualquer modificação dependente da frequência. O feedback do atuador ativo é calculado instantaneamente (a 50 Hz), e é novamente uma combinação linear das medições dinâmicas anteriores. Não há qualquer utilização de manipulação não linear. O design do controle também foi implementado numa simulação numérica no domínio do tempo (ou seja, integração direta) para evidenciar o desempenho da atenuação de vibração do controlo do acionador. Para o modo de excitação, foi utilizada a mesma abordagem de controle em combinação com um desvio de deslocamento que representa a excitação da torre para o valor de deslocamento pretendido. O desvio é uma função sinusoidal baseada na frequência fundamental detetada de cada direção. A saída de controle para contrariar a variação do deslocamento do topo devido a outras perturbações é depois modulada na função de desvio sinusoidal e o valor de controle é adaptado em conformidade.
O controle de feedback linear de redução da resposta dinâmica da torre perpendicular à excitação permite que o comando de força para o atuador seja uma soma linear ponderada especificada das sete medições dinâmicas do programa. As sete medições são: Da aceleração do TMD e da torre, da velocidade do TMD e da torre, do deslocamento do TMD e da torre, e do deslocamento relativo do TMD e da torre. É importante realçar que os fatores de ponderação são valores em escala simples, positivos ou negativos. A parametrização do fator de ponderação baseia-se em testes experimentais dinâmicos da torre. O feedback do atuador está ativo é calculado instantaneamente (50 Hz) e os fatores de ponderação são em escala, sendo que não utilizam qualquer forma de função de transferência dependente da frequência. Além disso, o feedback é uma combinação linear da propriedade dinâmica. Não há qualquer utilização de manipulação ou lógica não linear. O design de controle foi implementado para uma simulação numérica no domínio temporal (integração direta) de modo a que, para cada passo temporal, a introdução de força para a massa do TMD como controlo do atuador possa ser adaptada. A figura 12 mostra os resultados da simulação para a supressão de vibrações – os deslocamentos da torre e o curso resultante da massa do TMD.
Para o modo de excitação, foi utilizada a mesma abordagem de controlo em combinação com um desvio que representa a excitação da torre para um valor de deslocamento pretendido. O desvio é uma função sinusoidal baseada na frequência fundamental detetada de cada direção. A saída de controlo para contrariar a variação do deslocamento do topo devido à perturbação é depois modulada na função de desvio sinusoidal e o valor de controlo tem de ser adaptado em conformidade. Para este desvio, foi determinado experimentalmente um fator de ponderação. A figura 13 mostra os resultados numéricos com perturbação da carga de rajada de vento para o modo de excitação com uma simples excitação sinusoidal e com um algoritmo de controlo aplicado.
8.0 Conceito de segurança
Tendo em consideração a força de +/- 40 kN que pode ser fornecida pelos acionamentos lineares que são utilizados como atuadores, é indispensável um conceito de segurança para assegurar que os deslocamentos da torre não excedam as disposições de fadiga. Isto aplica-se mesmo que a saída de força não seja suficiente para causar deflexões do topo superiores aos +/-200 mm pré-determinados. Uma abordagem para aumentar a segurança do sistema foi aumentar a redundância dos sensores de monitorização que estão a registar a deflexão do topo da torre. Isto pode ser alcançado da melhor forma através da implementação de um sistema de monitorização independente adicional que, idealmente, utiliza um princípio de medição diferente do hardware de controlo existente. Para o projeto aqui apresentado, o hardware de controle utilizou, conforme referido, acelerómetros e um limiar de aceleração definido para a filtragem de sinais com filtro passa-banda dentro do intervalo de frequências naturais relevantes da estrutura. O principal sistema de monitorização superordenada é um Sistema Global de Navegação por Satélite (GNSS) com uma precisão de +/- 10 mm. O sistema GNNS requer uma estação básica de referência que esteja a processar os dados de coordenadas para os valores existentes de resposta ao deslocamento. Se o deslocamento do topo da torre exceder um limiar pré-determinado durante o modo de excitação artificial, que pode dever-se a um acréscimo de vento ou a outra excitação, um relé irá comutar o sinal de presença para 0 V. Isto provocará a interrupção do modo de excitação. Adicionalmente, ambos os sistemas de monitorização estão constantemente a verificar os dados adquiridos para detectar sinais de sensores defeituosos, o que também resultará na interrupção do modo de excitação ativo. Os sinais defeituosos de aceleração/potenciómetro de cabo serão detetados por um critério de seleção de pico espetral – apenas se for possível a seleção de picos num intervalo relevante, pode assumir-se que os sensores fornecem sinais legítimos. Enquanto o sistema GNNS analisa a alteração dos dados das coordenadas, se os dados amostrados não se alterarem a tempo, assume-se automaticamente que existe um sinal defeituoso.
9.0 Testes de Vibração
Os testes iniciais de vibração da torre foram executado na fase atual, na qual a torre ainda não está concluída, pelo que as frequências fundamentais da torre nesta fase estão acima do intervalo de sintonização especificada do sistema passivo do TMD. O TMD é ajustado para a maior frequência de sintonização possível. O objetivo dos testes de vibração foi a determinação das frequências fundamentais da torre com o sistema TMD bloqueado, bem como o amortecimento estrutural inerente. Além disso, o comportamento dinâmico com o sistema passivo do TMD acionado deve ser determinado, bem como o aumento do amortecimento estrutural devido ao sistema passivo do TMD. Para identificar as frequências naturais fundamentais da torre, o Método da Densidade Espetral de Potência Normalizada Média (ANPSD) [1] pode ser utilizado. Para isso, os históricos temporais registados têm de ser separados em segmentos. Estes segmentos têm de ser transformados no domínio da frequência. Os espetros resultantes têm de ser normalizados, calculados como média e multiplicados com os espectros conjugados complexos.
Ao fazê-lo, todas as vibrações aleatórias serão eliminadas e apenas as vibrações livres recorrentes da estrutura serão exibidas no espectro médio, que agora representa as frequências naturais predominantemente excitadas da torre. A figura 14, à esquerda, mostra os históricos temporais registados das vibrações ambientais horizontais nas direções x e y com o TMD bloqueado. A figura 14, à direita, mostra a média dos Espectros de Potência Automática resultantes para um comprimento de segmento de 120 segundos. Os espectros mostram que a torre apresenta uma resposta dinâmica a duas frequências dominantes (0,225 Hz na direção x e 0,245 Hz na direção y).
Para além do Método do Espectro de Potência Média acima descrito, que assume que a excitação ambiente provoca uma resposta dinâmica suficiente nos modos de vibração de interesse para obter segurança estocástica, as frequências naturais foram determinadas utilizando o software de processamento de sinais comerciais ARTEMIS, [1] que incorpora os Métodos de Identificação do Subespaço Estocástico e de Decomposição Melhorada do Domínio da Frequência.
A Decomposição Melhorada do Domínio da Frequência (EFDD) e a Identificação do Subespaço Estocástico são técnicas vastamente utilizadas para a identificação de parâmetros modais apenas de saída.
O método EFDD baseia-se no cálculo dos espectros de resposta. São, portanto, necessários registos extensos para manter um nível reduzido de erros na estimativa do espectro e para extrair parâmetros modais de uma forma fiável. O algoritmo de identificação do subespaço estocástico foi aplicado para identificar pontes através da utilização de um modelo apenas de saída. Os métodos de identificação do subespaço estocástico funcionam no domínio temporal e baseiam-se numa descrição do espaço para o estado do problema dinâmico. Os resultados da identificação do sistema em diferentes ordens de modelos são comparados para distinguir os verdadeiros modos estruturais dos modos espúrios nos chamados diagramas de estabilização. Estes diagramas são uma forma popular de selecionar o modelo do sistema identificado, uma vez que os verdadeiros modos estruturais tendem a ser estáveis para ordens de modelos sucessivos, cumprindo certos critérios de estabilização que são avaliados num procedimento automático. A figura 15 mostra um cartão de estabilidade resultante para os dados ambientais registados, a partir do qual os modos relevantes podem ser determinados. Os modos identificados e as taxas de amortecimento determinadas para cada modo no estado com TMD bloqueado (à esquerda) e com o TMD ativado (à direita) também são mostrados na Figura 14. Pode ser observado um aumento do amortecimento estrutural. O amortecimento estrutural adicional encontra-se no intervalo de um valor teórico que pode ser determinado a partir do modelo teórico para o qual foi considerada a configuração do TMD não sintonizado. Para além dos testes de vibração ambiente com o sistema passivo do TMD, foram realizados testes preliminares com o modo de excitação ativa, apesar do estado de não sintonização do sistema TMD. A figura 12, à esquerda, mostra o histórico temporal das acelerações registadas no topo da torre. Após uma excitação sinusoidal inicial, o algoritmo para um nível de aceleração constante foi ativado para determinar experimentalmente a correlação entre a deflexão da torre e o deslocamento forçado da massa do TMD. O histórico temporal mostrado na Figura 12 mostra os dois cenários de teste no modo de excitação e os espectros FFT correspondentes mostram a resposta clara da torre nas suas duas frequências fundamentais (direção x e y). A secção temporal assinalada a verde é uma excitação sinusoidal da massa com controlo ativo inviabilizado que provocou uma resposta dinâmica em ambas as direções principais. O espectro FFT resultante exibe os dois picos para identificar as frequências fundamentais nestas duas direções. O segmento temporal assinalado a azul corresponde a uma excitação com controlo ativo viabilizado que causou um deslocamento mais constante da torre de forma predominante numa direção. A dissipação da vibração resultante após o modo de excitação ter sido desligado foi também utilizado para determinar o amortecimento estrutural e determinado como sendo D=2,4%. Este resultado está correlacionado com a taxa de amortecimento determinada com os algoritmos SSI.
10.0 Conclusão e Perspetivas
Foi instalado um TMD de Dupla Utilização na Torre de Testes Thyssen Krupp de 246 m de altura com o objetivo de excitar propositadamente a torre para se obter uma resposta dinâmica controlada nas suas frequências fundamentais. O objetivo desta excitação é conseguir uma oscilação definida do edifício nas duas direções principais da torre. Com base em cálculos numéricos, verificou-se que era necessária uma massa de 240 t do TMD para atingir o amortecimento suplementar necessário para o modo passivo e para gerar a força de controlo necessária para atingir um deslocamento do topo da torre de +/- 200 mm. Para criar um nível de deslocamento constante para o modo de excitação e para suprimir os deslocamentos causados pelo vento e a componente de vibração forçada na direção perpendicular, foi desenvolvido e testado um algoritmo de controle com simulações numéricas. Após a instalação do sistema do TMD do tipo pêndulo passivo, para o qual foram utilizadas placas pré-fabricadas de concreto como massa de reação, os atuadores foram colocados em funcionamento e foram realizados os testes iniciais. Os testes revelaram que o amortecimento inerente da torre era superior ao previsto, mas foi possível determinar claramente todos os modos relevantes. O modo de excitação ativa do edifício está a funcionar e podia ser testado, embora não em toda a sua extensão, para derivar todos os parâmetros de funcionamento, uma vez que o edifício ainda não está totalmente concluído. Devido ao estado prematuro do edifício, não foi possível adaptar o DTM passivo às frequências fundamentais determinadas.
Assim que o sistema TMD tiver sido adaptado, serão realizados mais testes ao edifício que incluirão também testes relativos ao amortecimento dependente da amplitude e à integridade do conceito de segurança.
REFERÊNCIAS
[1] Wenzel, H., Pichler, D., Schedler, R. (1991). “Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken”, Bauingenieur 74
[2] Döhler, M., Andersen, P.: Mevel, L. (2012). “Operational Modal Analysis using a Fast Stochastic Subspace Identification Method”, Conference Proceedings of the Society for Experimental Mechanics Series
[3] Soong, T.T., Spencer, J.R. (2000). “Active, Semi-Active and hybrid control of structures” In 12th World Conference for Earthquake Engineering
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: Nova Iorque, NI, EUA, 1990
[9] Preumont, A., Kazuto, S. (2008).”Active Control of Structures”, Wiley, Padstow
Compartilhar esta publicação
Compartilhar esta publicação
Outros Recursos
Precisa de mais informações sobre este tópico?
Não hesite em contactar-nos com a sua pergunta individual.
Um dos nossos engenheiros de projeto entrará em breve em contato.
Outros Recursos
Precisa de mais informações sobre este tópico?
Não hesite em contactar-nos com a sua pergunta individual.
Um dos nossos engenheiros de projeto entrará em breve em contato.